Hobbit
Here is a photo of the WiFi adapter plugged into Hobbit:
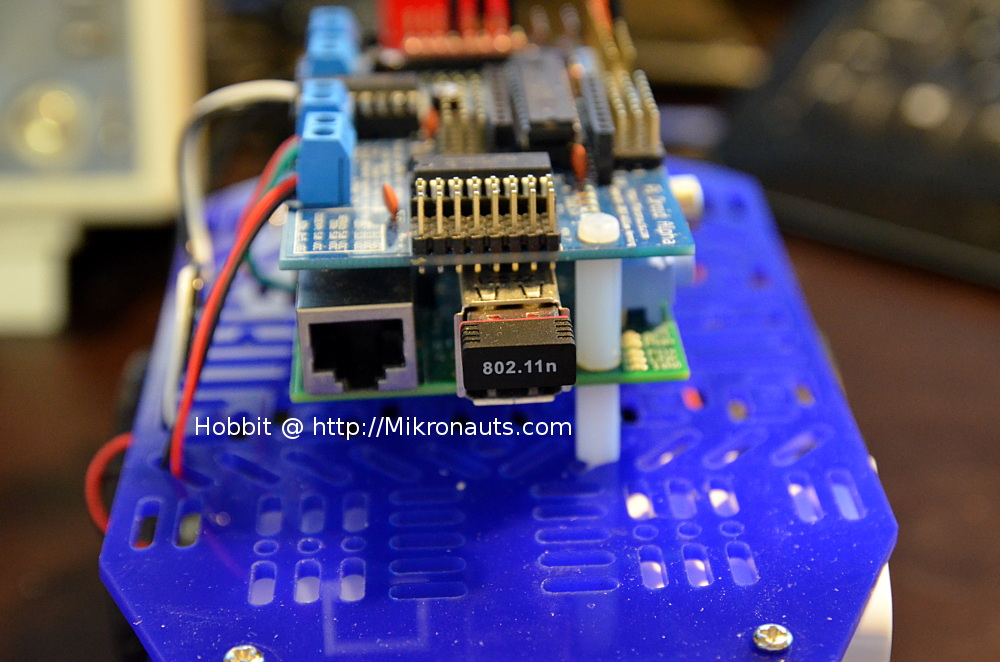
(click on the image above for larger version)
Analog Input pins
Pi Droid Alpha has eight channels of 10 bit analog input.
| Analog input pin | Function |
| AIN SIG pin | 0-5V analog input |
| AIN VCC pin | 5V power |
| AIN GND pin | Ground |
RoboPi has eight channels of 12 bit analog input.
Hobbit will use the analog inputs to read sensors that have analog outputs.
Examples of such sensors are:
- analog IR distance sensors
- analog output accelerometers
- potentiometers
- light level sensors
Connecting the Batteries
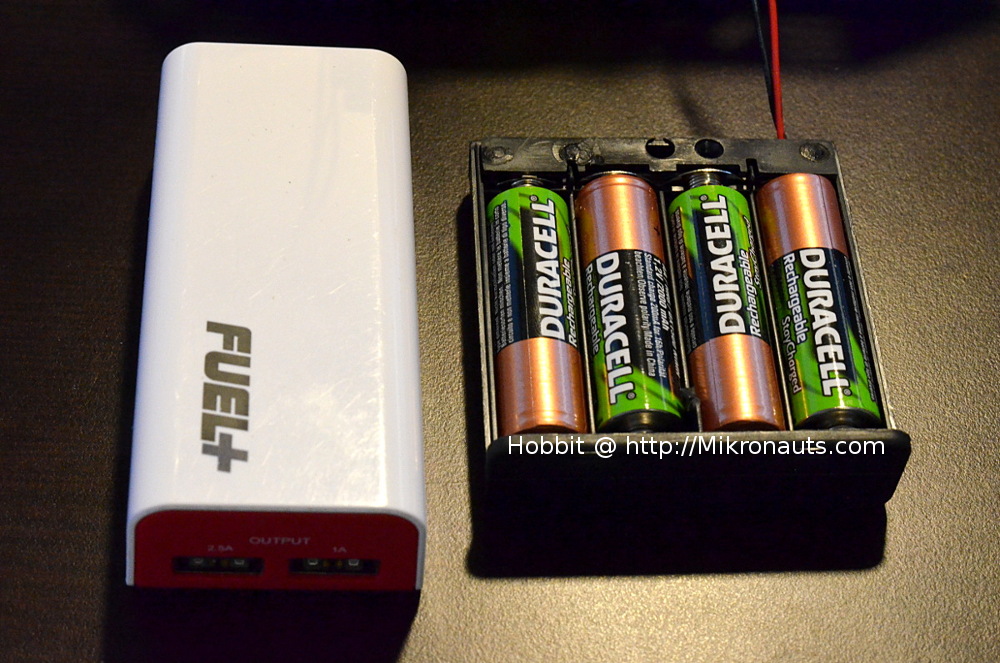
(click on image for larger version)
Use a short micro USB cable to connect the 2A output of the power bank to the micro USB power input on your Pi.
Connect the red (+) and black (-) cables from the 4xAA battery pack to the (+) and (-) Motor VIN screw terminal as shown below.
Connecting the Motors
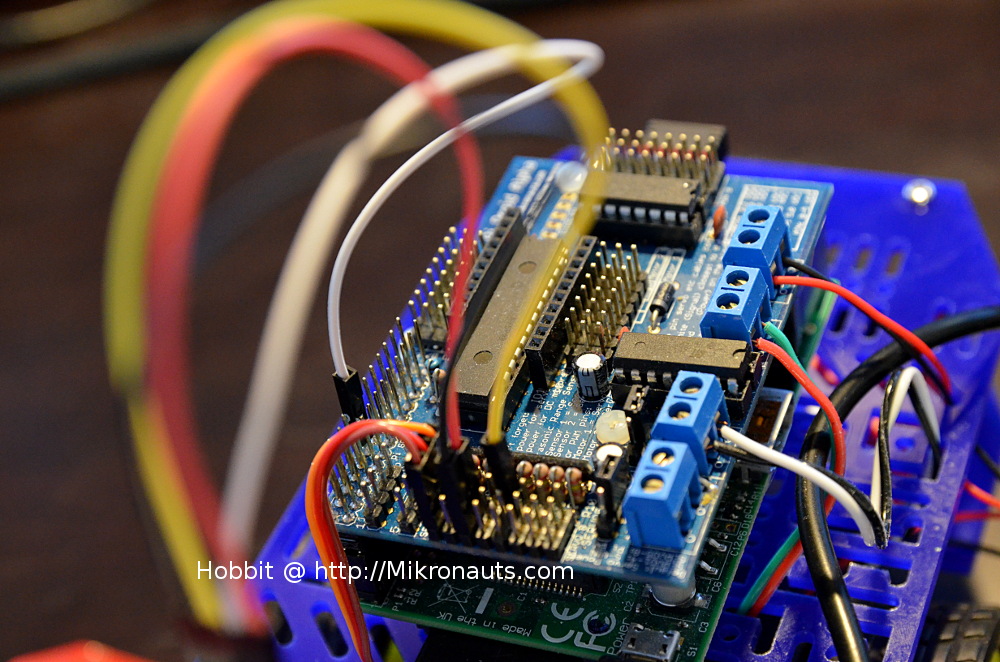
(click on image for larger version)
Connecting the motors is made easy by the screw terminals.
From left to right:
- servo power in: not used
- motor 1: left (port) motor
- motor 2: right (starboard) motor
- motor power in: 4xAA NimH batter pack
I previously soldered a red/green wire to the port motor, and a white/black wire to the starboard motor.
Don’t worry too much if you get the motor polarities wrong, it is easy enough to swap the wires around.
I did not provide external power for servos, as I am only using a single 9g servo that uses so little power that I could power it from the Pi.